Undergraduate Thesis Project
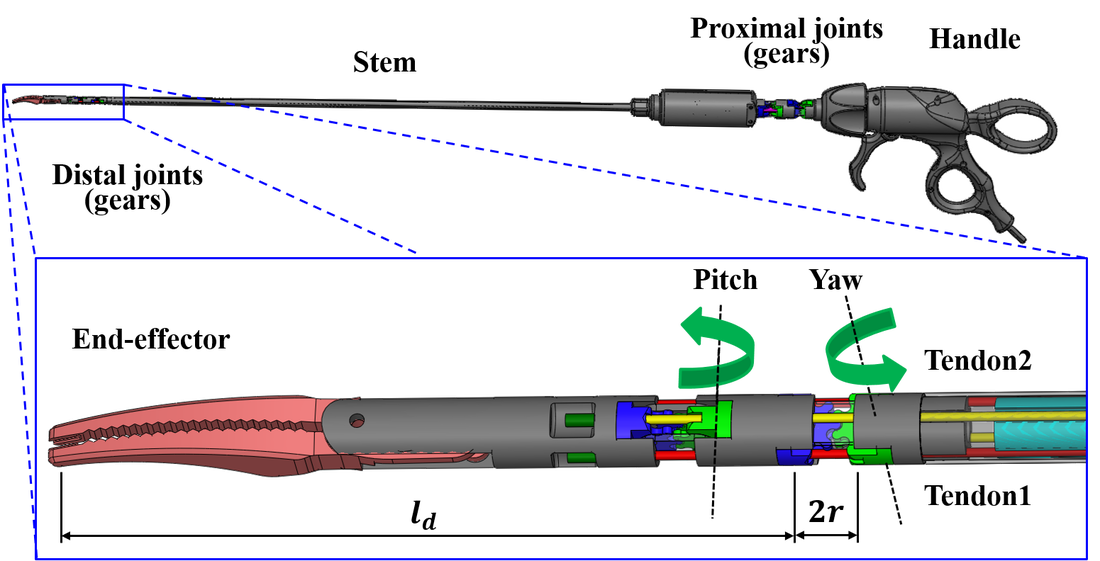
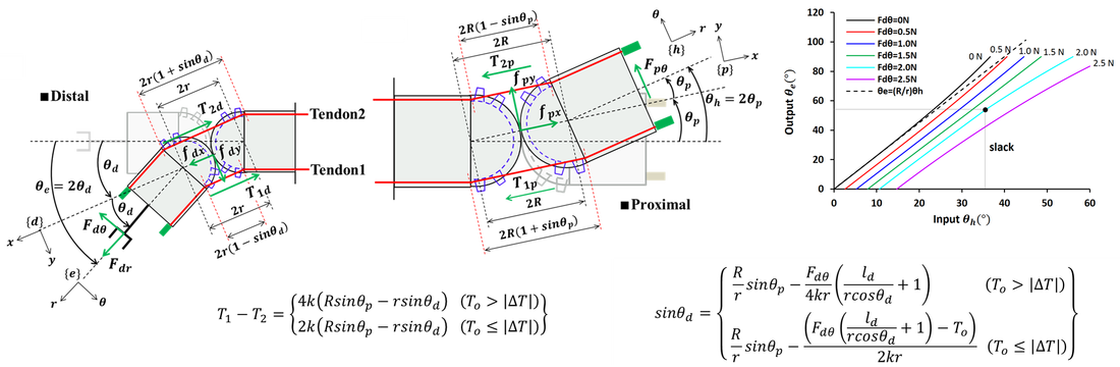
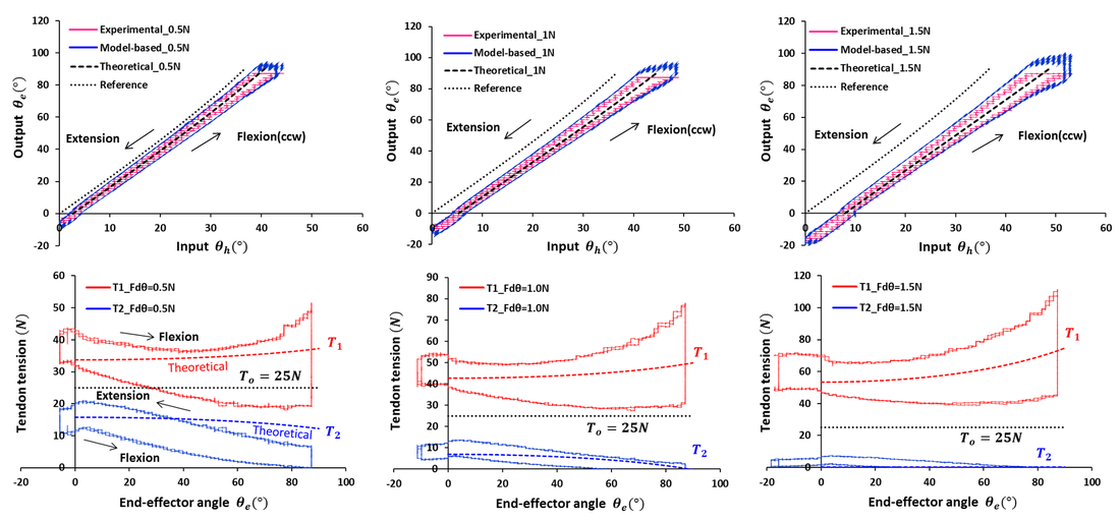
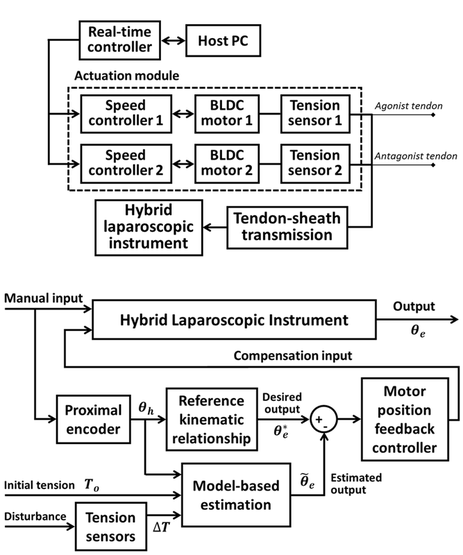
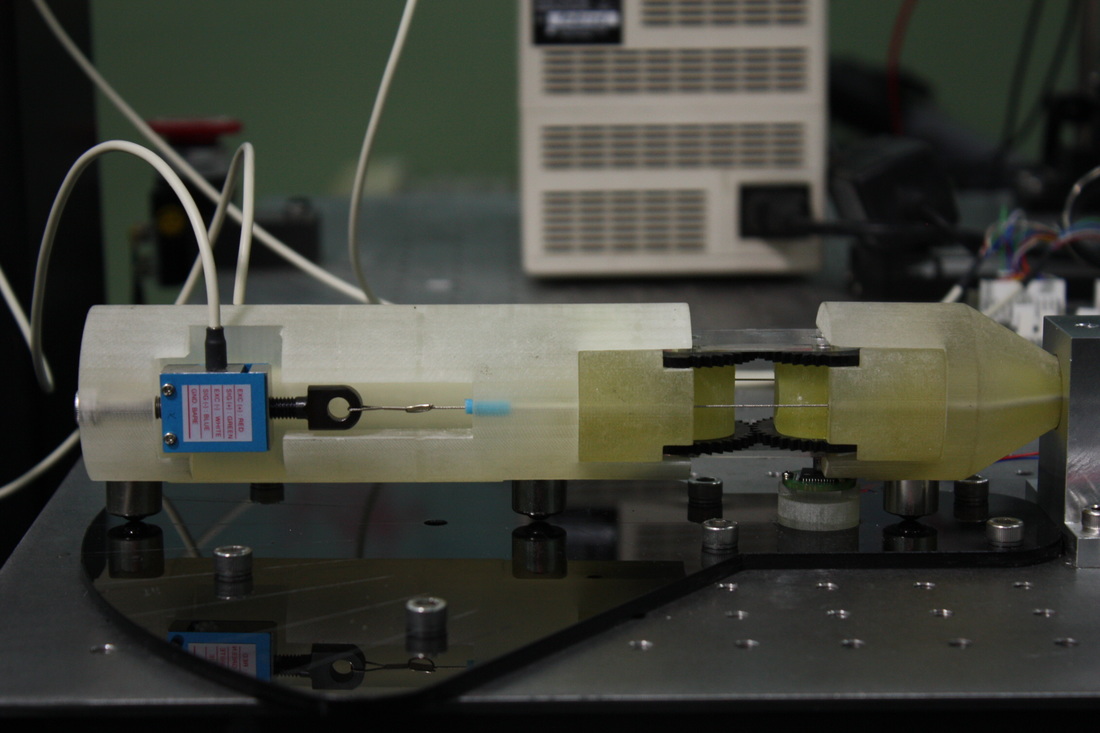
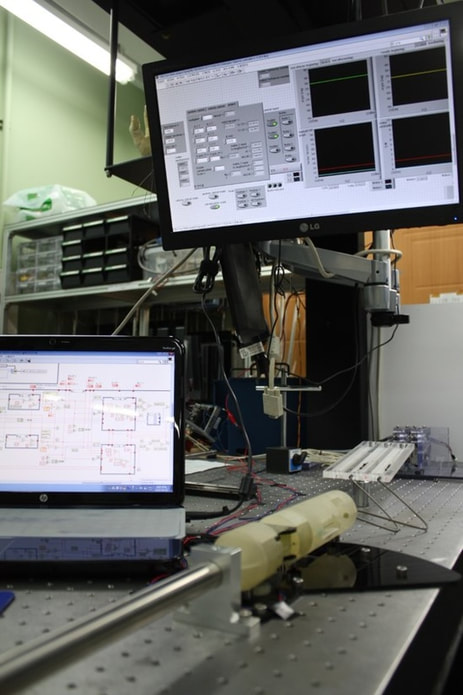
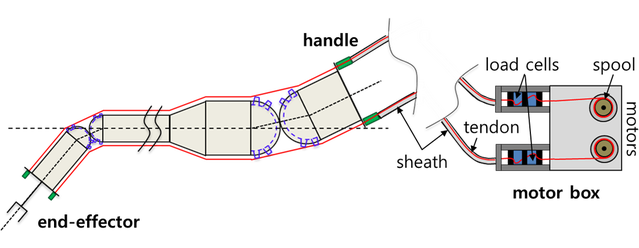
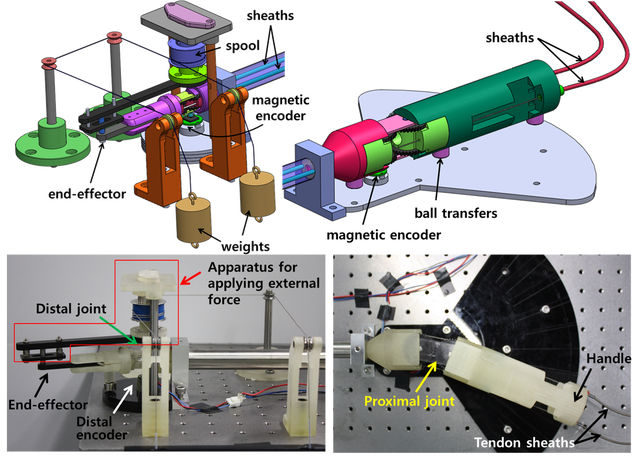
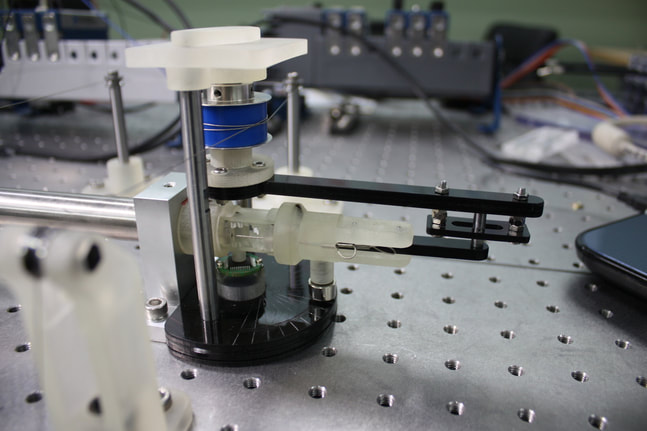
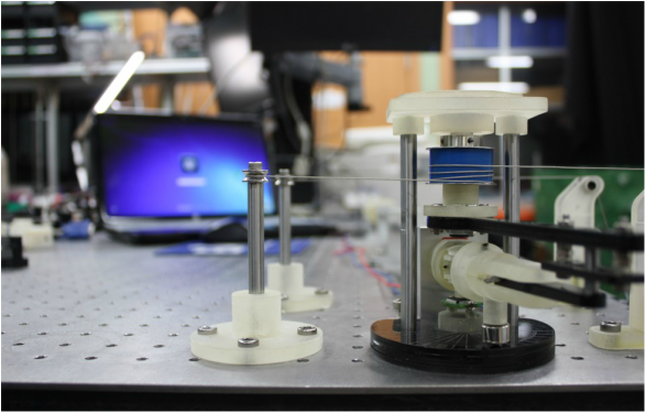
Extending my design experience in the Learning Factory program, I conducted a research project to develop a hand-held motorized articulated instrument for single-port laparoscopic surgery as an undergraduate researcher in Biorobotics Laboratory (BRL) with Prof. Kyu-Jin Cho at Seoul National University. The design intent was to help surgeons overcome the loss of dexterity caused by elastic deformation when using a tendon-driven instrument in laparoscopic surgery. I quantitatively identified the loss of dexterity through mathematical modeling and kinematic analysis of the articulated instrument and built the compensation control scheme which was to balance the loss of dexterity by means of motorized actuation of the antagonistic pair of tendons. In order to avoid the miniaturization challenges in testing the design concept using a prototype, I applied the principle of elastic similarity to enable the use of a large-scale model when evaluating performance and force-related characteristics of the proposed design, instead of building a costly prototype in actual size.

|
|
|
|